Hidden Surface Removal
CS-116A: Introduction to Computer Graphics
Instructor: Rob Bruce
Fall 2016
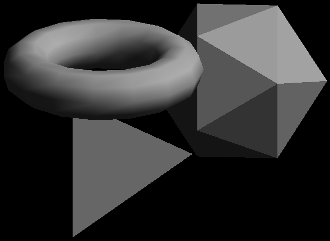
SLIDE 1: Hidden surface removal: Occlusion example
SLIDE 2: Visibility detection: Methods
- Z-buffer method
- A-buffer method
- Scan-line method
- Depth-sorting method
- Binary Space-Partitioning (BSP) tree method
- Area-subdivision method
- Octree method
- Ray-Casting method
Source: Computer Graphics with OpenGL, pp. 481-495
SLIDE 3: Visibility detection method: Z-buffer
- Z-buffer method:
- Object depth computed one pixel at a time to determine visible surfaces.
- Depth buffer used to store information about each pixel’s depth for a given object.
- Disadvantage: can’t average pixel colors when pixels have transparency (opacity). In other words, this algorithm only works with solid surfaces!
Source: Computer Graphics with OpenGL, pp. 481-482, 485.
SLIDE 4: Visibility detection method: A-buffer
- A-buffer method.
- Similar to Z-buffer method.
- "antialiasing, area-averaging, visibility detection method..."
- Transparent pixel color influenced by other pixels behind the transparent pixel. In other words, transparent surfaces in the foreground allow visibility of objects behind them.
Source: Computer Graphics with OpenGL, pp. 484-485.
SLIDE 5: Visibility detection method: Scan-line
- Scan-line method.
- Horizontally scan left to right, top to bottom to determine depth values for various objects on the screen.
- Depth values evaluated only for surfaces which overlap.
Source: Computer Graphics with OpenGL, pp. 486-487.
SLIDE 6: Visibility detection method: Depth-sorting
- Depth-sorting method.
- Also referred to as the “painter’s algorithm”. Think about painting a picture. You layer one color of paint on top of other layers. The layers underneath are effectively covered by the top layer.
- Procedure:
- "Surfaces are sorted in order of decreasing depth."
- "Surfaces are scan-converted in order, starting with the surface of greatest depth."
- Surfaces are effectively stacked on top of other surfaces on the canvas (visible screen) from smallest Z-axis value to largest Z-axis value.
Source: Computer Graphics with OpenGL, pp. 487-490.
SLIDE 7: Visibility detection method: BSP-tree
- BSP-tree (Binary Space-Partitioning) method.
- Binary tree with left and right branches: left branch = object is in front (visible), right branch = object is in back (object is occluded).
- "...useful when the view reference point changes, but the objects in a scene are at fixed positions."
- Tree is traversed in order of objects appearing from back to front.
Source: Computer Graphics with OpenGL, pp. 490-491.
SLIDE 8: Visibility detection method: Area-subdivision
- Area-Subdivision method
- "...successively dividing the total view-plane area into smaller and smaller rectangles until each rectangular area contains the projection of part of a single visible surface, contains no surface projections, or the area has been reduced to the size of a pixel."
- Surface subdivision stops when one of the following conditions is satisfied:
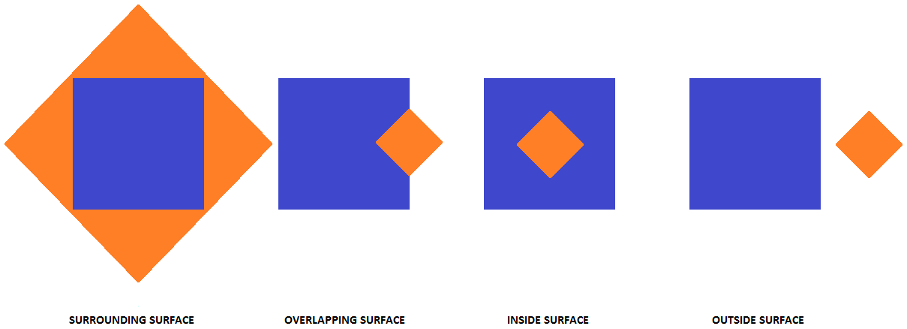
"Condition 1: An area has no inside, overlapping, or surrounding surfaces (all surfaces are outside the area)."
"Condition 2: An area has only one inside, overlapping, or surrounding surface."
"Condition 3: An area has one surrounding surface that obscures all other surfaces with the area boundaries."
Source: Computer Graphics with OpenGL, pp. 491-493.
SLIDE 9: Area-subdivision: surface cases
Source: Computer Graphics with OpenGL, p. 492.
SLIDE 10: Visibility detection method: Ray-casting
- Ray-casting method.
- Cast a ray of light from each pixel position to the nearest object to determine visible surfaces.
- An effective method for curved surfaces such as spheres.
Source: Computer Graphics with OpenGL, pp. 494-495.
Robert Bruce
Research
Courses
Fall 2016, CS-116A:
Lectures:
- Introduction to OpenGL and GLUT
- Fractals
- Splines
- Mesh: Vertices, Edges, and Faces
- Event driven programming, capturing keypresses and mouse clicks
- Camera and clipping plane
- Animating the camera
- Light and Color (part 1 of 2)
- Light and Color (part 2 of 2)
- Graphics File Formats
- Creating mouse-driven menus in GLUT
- Developing Graphical user interface widgets with OpenGL
- Hidden surface removal
- GLSL: OpenGL Shading Language (part 1 of 2)
- GLSL: OpenGL Shading Language (part 2 of 2)
- Accelerated Graphics Hardware (GPU)
- Metaballs and Blobbies
- Linear transformations
- Coordinate systems in OpenGL
- Introduction to Blender
- Algorithmic animation and modelling (part 1 of 2)
- Algorithmic animation and modelling (part 2 of 2)
- Squash, Stretch, and Bounce: The twelve principles of animation
- Character Rigging for animation
- Augmented Reality and Virtual Reality
- Introduction to WebGL
Assignments:
Handouts:
- Creating a bootable Linux Mint flash drive
- How to update software on Linux Mint
- Installing OpenGL libraries in Linux Mint
Programs:
Other
