A review of classical mechanics in physics
CS-116B: Graphics Algorithms
Instructor: Rob Bruce
Spring 2016
SLIDE 1: Newton's three laws of motion
- 1st law of motion (law of inertia): A body remains at rest, or moves in a straight line (at a constant velocity), unless acted upon by a net outside force.
- 2nd law of motion: The acceleration of an object is proportional to the force acting upon it. F = m * a
- 3rd law of motion (law of reciprocal actions): For every action, there is an equal and opposite reaction.
SLIDE 2: Vectors
A vector contains two components:
- A scaler value
- A direction
Example: vector v = Aî + Bĵ + Ck̂
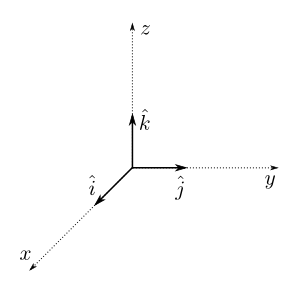
Image source: https://upload.wikimedia.org/wikibooks/en/9/98/Unit-vectors-in-Cartesian-Coord.png
{kind=link}
SLIDE 3: Computing vector magnitude
vector v = Aî + Bĵ + Ck̂
Magnitude of vector v:
||v|| = SQRT(A2 + B2 + C2)
SLIDE 4: Normalizing a vector (also called unit vector)
vector v = Aî + Bĵ + Ck̂
normalized vector v = v / ||v|| = v / SQRT(A2 + B2 + C2)
SLIDE 5: Computing the vector dot product (also called scalar product)
vector v1 = Aî + Bĵ + Ck̂
vector v2 = Dî + Eĵ + Fk̂
v1 • v2 = ||v1|| * ||v2|| * cos(θ)
v1 • v2 = Aî • Dî + Aî • Eĵ + Aî • Fk̂ + Bĵ • Dî + Bĵ • Eĵ + Bĵ • Fk̂ + Ck̂ • Dî + Ck̂ • Eĵ + Ck̂ • Fk̂
v1 • v2 = A*D*cos(0°) + A*E*cos(90°) + A*F*cos(90°) + B*D*cos(90°) + B*E*cos(0°) + B*F*cos(90°) + C*D*cos(90°) + C*E*cos(90°) + C*F*cos(0°)
v1 • v2 = A*D + B*E + C*F
SLIDE 6: Computing the vector cross product (also called vector product)
The right hand rule:
î × ĵ = k̂
ĵ × k̂ = î
k̂ × î = ĵ
î × k̂ = -ĵ
ĵ × î = -k̂
k̂ × ĵ = -î
vector v1 = Aî + Bĵ + Ck̂
vector v2 = Dî + Eĵ + Fk̂
n̂ represents the unit vector perpendicular to vectors v1 and v2 using the right hand rule.
v1 × v2 = ||v1|| * ||v2|| * sin(θ) n̂
v1 × v2 = Aî × Dî + Aî × Eĵ + Aî × Fk̂ + Bĵ × Dî + Bĵ × Eĵ + Bĵ × Fk̂ + Ck̂ × Dî + Ck̂ × Eĵ + Ck̂ × Fk̂
v1 × v2 = A*D*sin(0°) + A*E*sin(90°)k̂ - A*F*sin(90°)ĵ - B*D*sin(90°)k̂ + B*E*sin(0°) + B*F*sin(90°)î + C*D*sin(90°)ĵ - C*E*sin(90°)î + C*F*sin(0°)
v1 × v2 = A*Ek̂ - A*Fĵ - B*Dk̂ + B*Fî + C*Dĵ - C*Eî
v1 × v2 = (B*F - C*E)î + (C*D - A*F)ĵ + (A*E - B*D)k̂
Robert Bruce
Research
Courses
Spring 2016, CS-116B:
Lectures:
- A review of classical mechanics in physics
- Marching cubes algorithm
- Kinematics
- Particle systems
- Simulating cloth with gravity and wind
- Simulating cloth with gravity and collision detection
Assignments:
- Assignment 1: Marching Cubes
- Assignment 2: Particle explosion simulation
- Assignment 3: Rope simulation with gravity and collision detection
- Assignment 4: Cloth simulation with gravity
- Final assignment: Cloth simulation with gravity, wind, and collision detection
Other
