Building a Physics engine
CS-116B: Computer Graphics Algorithms
Instructor: Robert Bruce
Spring 2017
SLIDE 1: Components of a Physics Engine
A generic physics engine contains the following components:
- "Physics models"
- "Simulated objects manager"
- "Collision detection engine"
- "Collision response module"
- "Force effectors"
- "Numerical integrator"
- "Game engine interface"
Source: Physics for Game Developers, pp. 283
SLIDE 2: Physics Engine: Components we will use
- Physics models:
We will be using simple spheres, line segments, and polgons for our simulations. - Collision detection and collsion response:
We will use this to determine when a hanging rope collides with an inanimate sphere. We will also be using collision detection to determine when an animated sphere is colliding with hanging cloth. - Force effectors:
We will be using this to apply wind forces and gravity to hanging rope and cloth. - Numerical integrator:
We will be using this algorithm to animate the rope and cloth and give them elastic (somewhat) properties.
SLIDE 3: Numerical integrator
- We will be using Verlet integration to compute the displacement of interconnected particles connected together via weightless springs (Mass Spring Model).
- For simulating rope, the particles will be connected linearly like a chain.
- For simulating cloth, the particles will be connected in a mesh-like array.
- For rope and cloth simulation we will also be using the Mass Spring Model.
SLIDE 4: Particle Physics
- With the exception of Marching Squares, our assignments involve the displacement of particles.
- Note: For simplicity in developing our physics engine, you do not need to be concerned with transfer of momentum or conservation of energy in any of our projects.
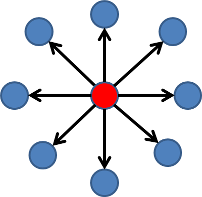
SLIDE 5: Particle Physics: Assignment 2
- In assignment 2, you will be creating an explosion.
- The particles will emanate from a center point.
- The particles will move in a random direction but the motion will remain straight.
- There is no gravity or other forces to influence trajectory of each particle.
- The particles will have constant velocity
- You will compute the displacement over time. You will compute displacement (s) for each particle over time (t) using:
s = v*t
SLIDE 6: Particle Physics: Assignment 2
SLIDE 7: Particle Physics: assignment 3
- In assignment 3, you will be simulating rope.
- The particles will be constrained to each other via weightless springs.
- The particles will have a mass, m.
- The particles will be affected by gravity. The particles are also affected by spring forces.
- You will use Newton’s second law of motion (F = ma) and Hooke’s law (F = kx).
- Some of the particles will collide with a motionless and weightless sphere. Note: You do not need to be concerned with transfer of momentum or conservation of energy during a collision.
SLIDE 8: Particle Physics: assignment 3

SLIDE 9: Particle Physics: assignment 4
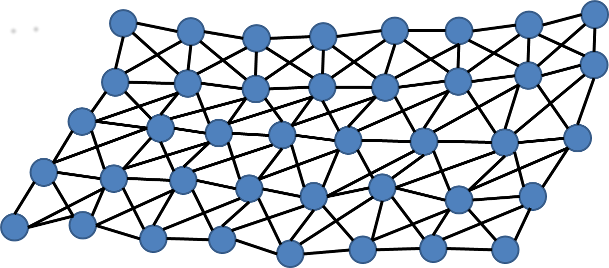
- In assignment 4, you will be simulating cloth.
- This is very similar to rope simulation except the particles are now connected to each other via a two-dimensional matrix of weightless springs.
- The springs are connected to particles horizontally, vertically, and diagonally.
- The springs are weightless. The particles have a mass, m.
- The particles are subject to a gravitational force. The particles are also subject to spring forces.
- You will use Newton’s second law of motion (F = ma) and Hooke’s law (F = kx).
SLIDE 10: Particle Physics: assignment 4
SLIDE 11: Particle Physics: assignment 5
- In assignment 5, you will be simulating cloth with wind, gravity, and collision detection. This assignment builds upon your previous work in cloth simulation.
- The springs are connected to particles horizontally, vertically, and diagonally.
- You will use Newton’s second law of motion (F = ma) and Hooke’s law (F = kx).
- The cloth will be subject to gravitational forces, random wind forces, and spring forces.
- The cloth will collide with a weightless, moving sphere.
SLIDE 12: Next lecture: Vector operations
- In our next lecture, we will review vectors and vector operations such as:
vector dot product
vector cross product
vector magnitude
normalizing a vector - These vector operations will be very important in developing our physics engine. We need to develop a robust library of vector math operations.
Robert Bruce
Research
Courses
Spring 2017, CS-116B:
Lectures:
- Marching cubes algorithm
- Marching squares algorithm
- Building a Physics Engine
Assignments:
- Assignment 1: Marching squares
- Assignment 2: Particle explosion simulation
- Assignment 3: Rope simulation with gravity and collision detection
- Assignment 4: Cloth simulation with gravity
- Assignment 5: Cloth simulation with gravity, wind, and collision detection
Other
