Outline
- Sensors
- Integration Algorithms
- More General Effects
- Intro to Geometric Modeling
Introduction
- We have been talking about lighting models suitable for high quality rendering using techniques like ray tracing.
- At the end of last day we observed that our method of modeling total light based as sum over light from different numbers of bounces in the scene:
`L^t = L^e + L^1 + L^2 + L^3 + ...`
yields the equations
`= L^e + BL^t`
`L^t(tilde x, vec v) = L^e(tilde x, vec v) + int_H dw f_(tilde x, vec n)(vec w, vec v) L^t(vec w, tilde x) cos (theta)`
called the rendering equation.
- We then went over some starter code for HW4.
- Today, we start by describing how model effects that come when physical camera can be modeled in our lighting setup.
- Then we look at techniques for solving the rendering equation before we switch to the topic of geometric modeling.
Sensors
- The image that a real world camera captures is `L^t` the total equilibrium light distribution of light in the scene.
- For a pinhole camera, the film plate captures the incoming radiance at each pixel/sample location along a single ray through the pinhole.
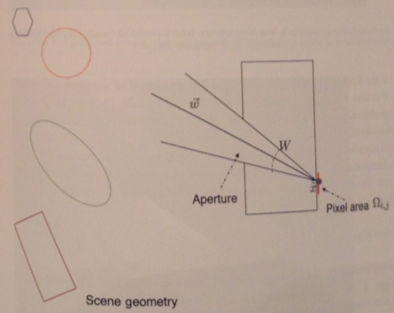
- In a non-pinhole, physical camera, we have a fixed aperture and a finite shutter speed which capture a finite amount of photons on our sensor plate as illustrated in the first picture above.
- We can model the pixel count received over time `T` at pixel `(i,j)` of sensor size `Omega_(i,j)` with spatial sensitivity, `F_(i,j)`, via the integral
`int_T dt int_(Omega_(i,j)) dA int_W dw F_(i,j)(vec w, tilde x)L^t(vec w, tilde x) cos (theta)`.
- Here `W` is the wedge of vectors coming in from the aperture toward the film point.
Lenses
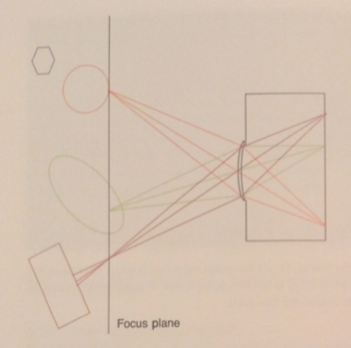
- To organize light, a real-world camera has a lens placed in front of the aperture.
- One model for such lenses is known as the thin lens model. The geometry of this model is illustrated by the second picture above.
- The effect of the lens in this model is to keep objects at a certain depth in focus (the circle above). Objects not of this depth appear blurred.
- In our equation this blurring occurs because of the integral `int_W`, the wedge into a point will actually be sampling light from several points of the surfaces it came from rather than one.
- We have seen how integration over the pixel area, can be used for anti-aliasing
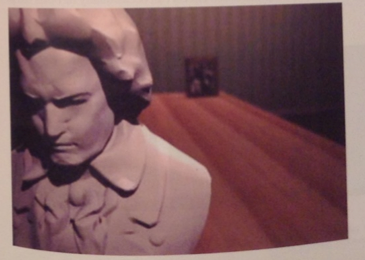
- Integration over shutter duration can be used to simulate motion blur (see above).
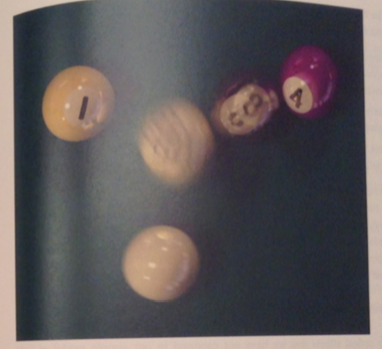
- Integration over the aperture produces focus and blur effects, also called depth of field effects (last image above).
Integration Algorithms
- The computation of the total equilibrium light distribution is a `L^e` plus a sum over the `L^i`'s.
- Each increase in `i` involves an additional nesting of the number of integrals that need to be integrated.
- Rather than compute these integrals, we typically approximate them as a sum over some set of samples of the integrand.
- Most of the work in photo-realistic rendering involves figuring out the best ways to approximate these integrals.
- Some common approximation techniques are:
- To use randomness to choose samples, This avoids noticeable patterns in the errors during approximation.
- Reuse computations -- if we know the irradiance pattern at a point, we might be able to share this data to simplify the computation of irradiance at nearby
points.
- Use cut-offs, so that we don't follow rays that don't carry much radiance.
Effects we have not Modeled
- Out simple model of light and reflection does not capture all possible optical effects.
- For example, atmospheric volumetric scattering which occurs when light passes through fog, is not capture by our model.
- Also, fluorescence, which occurs when surfaces absorb light and this re-emit this energy (often at a different wavelength), is also not
covered by our model.
- Our model also doesn't cover polarization and diffraction effects, although we did talk about anisotropic materials last semester in a different setting.
- Finally, our model also doesn't handle subsurface scattering. This happens when light enters at a point, bounces around inside the surface, and comes out over a finite region around the point of entrance. This kind of scattering has the effect of softening the surface as might be observed in pictures of skin or marble.
Geometric Modeling
- In computer graphics we need ways to represent shapes as data structures which could be coded.
- Geometric modeling is the topic of how to come up with such data structures that also us to represent, create, and modify shapes.
- Our next topic today is a basic introduction to common approaches used in geometric modeling.
Triangle Soup
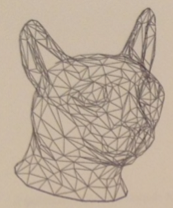
- The easiest to describe representation is to represent an object as a triangle soup: a set of triangles each described by three vertices.
- We can then reorganize this data to reduce redundancy.
- For example, we might store each vertex only once, even when it is shared by many triangles, and use an index buffer.
- We might use triangle strips or triangle fans to specify the triangles and their connectivity more compactly.
- Related to triangle soups one can also have quad soups and polygon soups.
- At hardware rendering time, these polygons are typically diced into triangles and drawn using a usual triangle rendering pipeline.
- Triangle geometry can be created in a number of ways, and many geometric modeling tools can be used to output triangles.
- We will describe later some techniques for tessellating a surface into triangles.
Meshes
- One thing lacking in triangle soups is a way to "walk along" the geometry
- One cannot usually in constant time figure out which triangles meet at an edge or which triangles surround a vertex.
- Walking along a mesh can be useful, for example, if we want to make the geometry smoother or if one wants to model a physical process over the geometry.
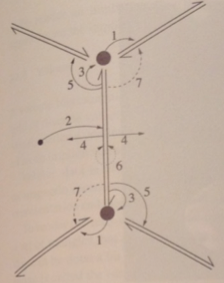
- A mesh is data structure representation that organizes the vertex, edge, and face data so that these queries can be done quickly.
- Above we can see an example of what might be stored in a mesh (winged-edge representation).










